机器人焊接工作站的组成结构图解(2)
时间:2017-04-26 17:05 来源:自动控制网
|
6、排烟系统:  7、机器人弧焊系统配置:  8、电气连接: 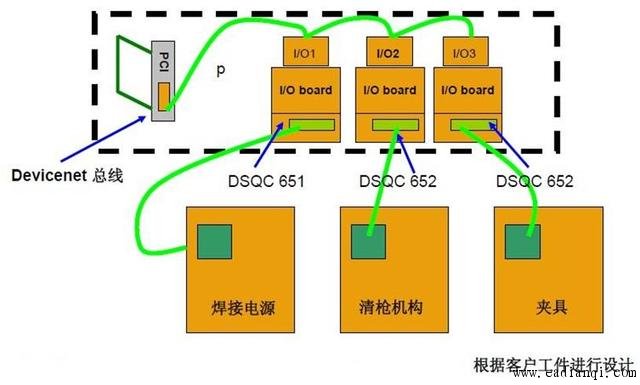 通常选择D651板 (8 DO, 8 DI, 2 AO(0~10V))
对于如 Fronius,ESAB, Kemppi ,Miller 等焊接电源,ABB都有相应的标 准接口软件。如果没有相应的接口模块,则选用通用模板进行配置。 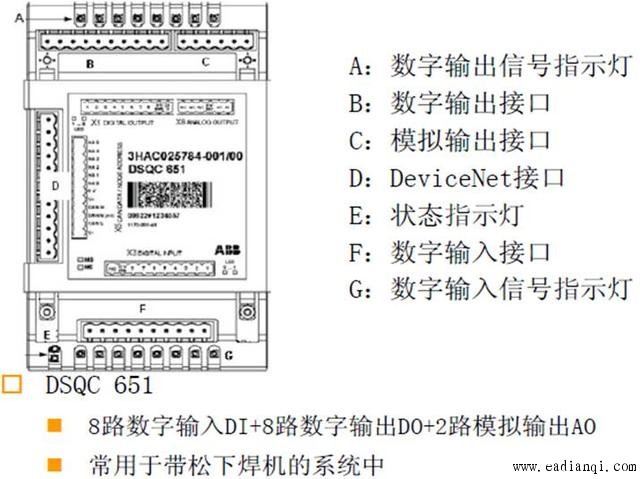 |
|
6、排烟系统: 7、机器人弧焊系统配置: 8、电气连接: 通常选择D651板 (8 DO, 8 DI, 2 AO(0~10V))
对于如 Fronius,ESAB, Kemppi ,Miller 等焊接电源,ABB都有相应的标 准接口软件。如果没有相应的接口模块,则选用通用模板进行配置。 |
