采用滞后网络进行校正,主要是利用其高频幅值衰减特性。应力求避免最大滞后角发生在已校正系统开环剪切频率 附近,否则将使系统动态性能恶化。因此选择滞后网络参数时,总是使网络的第二个转角频率 附近,否则将使系统动态性能恶化。因此选择滞后网络参数时,总是使网络的第二个转角频率 远小于 远小于 一般取 一般取
 (1) (1)
应用频率法设计滞后校正装置,其步骤如下:
1、根据性能指标对误差系数的要求,确定系统的开环增益K;
2、作出原系统的伯德图,求出原系统的相角和增益裕量;
3、如原系统的相角和增益裕量不满足要求,找一新的剪切频率 ,在 ,在 处开环传递函数的相角应等于-180o加上要求的相角裕量后再加上5o~12o,以补偿滞后校正网络的相角滞后。 处开环传递函数的相角应等于-180o加上要求的相角裕量后再加上5o~12o,以补偿滞后校正网络的相角滞后。
4、确定使幅值曲线在新的剪切频率 处下降到0db所需的衰减量201g 处下降到0db所需的衰减量201g ,再令20lg ,再令20lg =-201g =-201g , 由此求出校正装置的参数 , 由此求出校正装置的参数 。 。
5、取滞后校正装置的第二个转折频率 , , 太小将使 太小将使 很大,这是不允许的。 很大,这是不允许的。 确定后, 确定后, 就确定了。 就确定了。
6、作出校正后系统的伯德图,检验是否全部达到性能指标。
例6-2 设单位反馈系统的开环传递函数
要求的性能指标为: 1/s,相角裕量不低于35 1/s,相角裕量不低于35 ,增益裕量不低于10db,试求串联滞后校正装置的传递函数。 ,增益裕量不低于10db,试求串联滞后校正装置的传递函数。
解:(1)根据稳态指标要求求出K值。
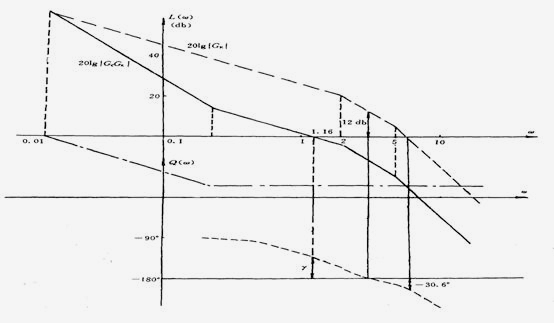
以 作出系统伯德图,见图1,求出相角裕量为 作出系统伯德图,见图1,求出相角裕量为 ,增益裕量为一12db。系统不稳定,谈不上满足性能指标要求,因此要对原系统进行校正。 ,增益裕量为一12db。系统不稳定,谈不上满足性能指标要求,因此要对原系统进行校正。
图1 滞后校正装置校正前后系统的对数特性
(2) 性能指标要求 ,取 ,取 ,为补偿滞后校正装置的相角滞后,相角裕量应按350十120=470计算,要获得470的相角裕量,相角应为一1800十470=一1330。选择使相角为1330的频率为校正后系统的开环剪切频率,由图上求得 ,为补偿滞后校正装置的相角滞后,相角裕量应按350十120=470计算,要获得470的相角裕量,相角应为一1800十470=一1330。选择使相角为1330的频率为校正后系统的开环剪切频率,由图上求得 ,即选择 ,即选择 =1.16(rad/s)。 =1.16(rad/s)。
(3) 选择 =1.16,即校正后系统伯德图在 =1.16,即校正后系统伯德图在 处应为0db。由图6-12可求出原系统伯德图在 处应为0db。由图6-12可求出原系统伯德图在 处为24.73db,因此,滞后校正装置必须产生的幅值衰减为—24.73 db,由此可求出校正装置参数 处为24.73db,因此,滞后校正装置必须产生的幅值衰减为—24.73 db,由此可求出校正装置参数 由
由 可求得 可求得 。为使滞后校正装置的时间常数 。为使滞后校正装置的时间常数 不过分大,取 不过分大,取 ,求出 ,求出 =74.32。这样,滞后校正装置的传递函数
校正后系统的开环传递函数
(4)作出校正后系统的伯德图,见图1,检验校正后系统是否满足性能指标要求。由图6—12可求出校正后系统相角裕量为 =74.32。这样,滞后校正装置的传递函数
校正后系统的开环传递函数
(4)作出校正后系统的伯德图,见图1,检验校正后系统是否满足性能指标要求。由图6—12可求出校正后系统相角裕量为 ,增益裕量 ,增益裕量 =12db,且 =12db,且 ,说明校正后系统的稳态、动态性能均满足指标的要求。 ,说明校正后系统的稳态、动态性能均满足指标的要求。 |