步进电机的功率驱动电路
时间:2015-09-17 17:02 来源:自动控制网
| 要使步进电动机能输出足够的转矩以驱动负载工作,必须为步进电机提供足够功率的控制信号,实现这一功能的电路称为步进电动机驱动电路。驱动电路实际上是一个功率开关电路,其功能是将环形分配器的输出信号进行功率放大,得到步进电动机控制绕组所需要的脉冲电流及所需要的脉冲波形。步进电动机的工作特性在很大程度上取决于功率驱动器的性能,对每一相绕组来说,理想的功率驱动器应使通过绕组的电流脉冲尽量接近矩形波。但由于步进电动机绕组有很大的电感,要做到这一点是有困难的。 常见的步进电动机驱动电路有二种: 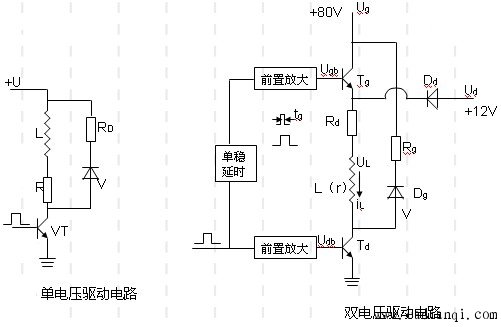 图 步进电机驱动电路
1)单电压驱动电路
这种电路采用单一电源供电,结构简单,成本低,但电流波形差,效率低,输出力矩小,主要用于对速度要求不高的小型步进电动机的驱动,图6-19所示步进电动机的一相绕组驱动电路(每相绕组的电路相同)。 当环形分配器的脉冲输入信号 2)双电压驱动电路 又称高低压驱动电路,采用高压和低压两个电源供电。在步进电动机绕组刚接通时,通过高压电源供电,以加快电流上升速度,延迟一段时间后,切换到低压电源供电。这种电路使电流波形、输出转矩及运行频率等都有较大改善。 当环形分配器的脉冲输入信号 |
