直流伺服电机结构和内部图解
时间:2015-09-17 17:06 来源:自动控制网
| 直流伺服电机在数控系统中应用很多,但是直流伺服电机也有一定的缺点:它的电刷和换向器易磨损;电机最高转速的限制,应用环境的限制;结构复杂,制造困难,成本高。 而交流伺服电机具有以下优点:动态响应好;输出功率大、电压和转速提高。因此,应用更为广泛。 交流伺服电动机的结构与普通的单相异步电动机的结构相似,其定子绕组则与单相电容式异步电动机结构相类似,其上装有两个在空间相隔90o的绕组,一个是励磁绕组WF,另一个是控制绕组WC,这两个绕组通常分别接在两个不同的交流电源(频率相同,相位不同)上,这一点与单相电容式异步电动机不同。其转子一般分为鼠笼转子和杯形转子两种结构型式。鼠笼转子和三相鼠笼式电动机的转子结构相似,杯形转子结构如图所示。杯形转子通常用铝合金或铜合金制成空心薄壁圆筒,为了减小磁阻,在空心杯形转子内放置固定的内定子。不同结构型式的转子都制成具有较小惯量的细长形。目前用得较多的是鼠笼转子。 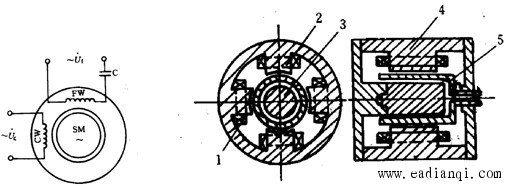
图 交流伺服电动机接线图 杯形转子伺服电动机结构图
交流伺服电动机以单相异步电动机原理为基础,励磁绕组WF接到电压为
式中,f为交流电源频率,Hz;P为磁极对数;
根据伺服系统工作性质的要求,控制电压一旦取消,电动机必须立即停止转动。但众所周知,单相异步电动机一旦转动以后,即使取消控制电压,仅靠励磁电压单相供电也会继续转动,即存在“自转”现象,这意味着失去控制作用,是不允许的,因而交流伺服电机必须解决“自转”问题。 从三相异步电动机的特性可知,转子电阻值对电动机的机械特性有较大的影响,如图所示。当转子阻值增大到一定程度,例如图中 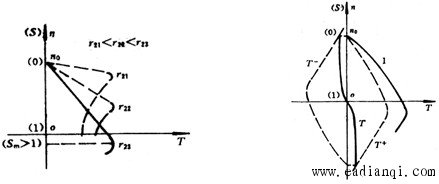
图 不同转子阻值时的机械特性曲线及交流伺服电动机
图中曲线1为有控制电压时伺服电机的机械特性曲线,曲线 增大伺服电机转子阻值 |
