自动控制网移动版
导航切换
首页
行业资讯
基础知识
电气控制
自动化
机器人
传感器
工业通讯
执行机构
线性系统
机床
机器人弹性力手爪
机器人仿生多指灵巧手
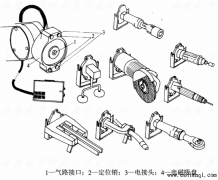
机器人专用操作器及转换器
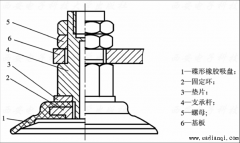
吸附式取料手
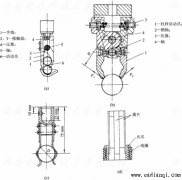
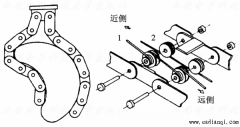
夹钳式取料手
机器人末端操作器
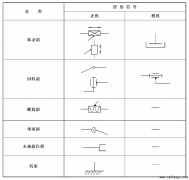
工业机器人的机构表示方式
并联机器人
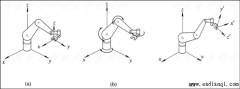
工业机器人的参考坐标系
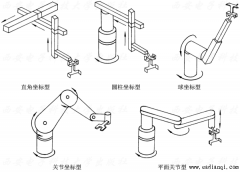
工业机器人的坐标
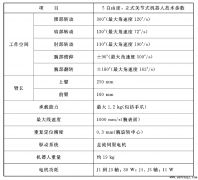
工业机器人的技术参数
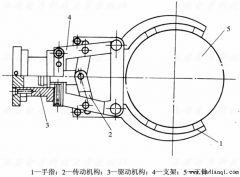
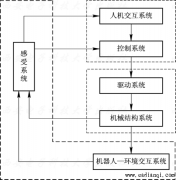
工业机器人的基本组成
首页
上一页
1
2
3
4
5
6
7
8
9
10
11
下一页
末页
1
2
3
4
5
6
7
8
9
10
11
12
13
14
共
14
页
163
条
最近关注
直角坐标机器人与关节机器人的区别
工业机器人伺服电机的特点以及不同类型伺服
工业机器人示教编程与离线编程的区别
Brokk机器人“故障”维修实例
常用运动学构形
机器人的控制系统
机器人主要结构
机器人常用材料