机器人基本系统构成
时间:2015-11-04 10:17 来源:自动控制网
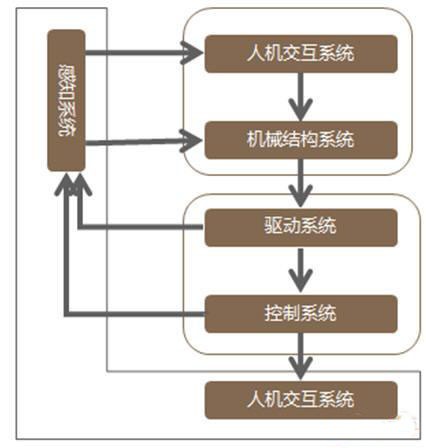
工业机器人由3大部分6个子系统组成。3大部分是机械部分、传感部分和控制部分。6个子系统可分为机械结构系统、驱动系统、感知系统、机器人环境交互系统、人机交互系统和控制系统。
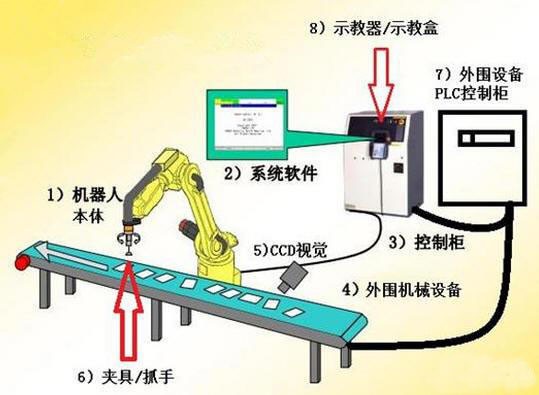
工业机器人系统构成 1)工业机器人的机械结构系统由机座、手臂、末端操作器三大部分组成,每一个大件都有若干个自由度的机械系统。若基座具备行走机构,则构成行走机器人;若基座不具备行走及弯腰机构,则构成单机器人臂。手臂一般由上臂、下臂和手腕组成。末端操作器是直接装在手腕上的一个重要部件,它可以是二手指或多手指的手抓,也可以是喷漆枪、焊具等作业工具。 2)驱动系统,要使机器人运作起来,需要在各个关节即每个运动自由度上安置传动装置,这就是驱动系统。驱动系统可以是液压传动、气压传动、电动传动、或者把它们结合起来应用综合系统,可以是直接驱动或者通过同步带、链条、轮系、谐波齿轮等机械传动机构进行间接传动。 3)感知系统由内部传感器模块和外部传感器模块组成,用以获得内部和外部环境状态中有意义的信息。智能传感器的使用提高了机器人的机动性、适应性和智能化的水准。人类的感受系统对感知外部世界信息是极其灵巧的,然而,对于一些特殊的信息,传感器比人类的感受系统更有效。 4)机器人环境交换系统是现代工业机器人与外部环境中的设备互换联系和协调的系统。工业机器人与外部设备集成为一个功能单元,如加工单元、焊接单元、装配单元等。当然,也可以是多台机器人、多台机床或设备、多个零件存储装置等集成为一个去执行复杂任务的功能单元。 5)人机交换系统是操作人员与机器人控制并与机器人联系的装置,例如,计算机的标准终端,指令控制台,信息显示板,危险信号报警器等。该系统归纳起来分为两大类:指令给定装置和信息显示装置。 6)机器人控制系统是机器人的大脑,是决定机器人功能和性能的主要因素。 控制系统的任务是根据机器人的作业指令程序以及传感器反馈回来的信号支配机器人的执行机构去完成规定的运动和功能。假如工业机器人不具备信息反馈特征,则为开环控制系统;若具备信息反馈特征,则为闭环控制系统。根据控制原理,控制系统可分为程序控制系统、适应性控制系统和人工智能控制系统。根据控制运行的形式,控制系统可分为点位控制和轨迹控制。点位型只控制执行机构由一点到另一点的准确定位,适用于机床上下料、点焊和一般搬运、装卸等作业;连续轨迹型可控制执行机构按给定轨迹运动,适用于连续焊接和涂装等作业。 控制系统的任务是根据机器人的作业指令程序以及传感器反馈回来的信号支配机器人的执行机构去完成规定的运动和功能。假如工业机器人不具备信息反馈特征,则为开环控制系统;若具备信息反馈特征,则为闭环控制系统。根据控制原理,控制系统可分为程序控制系统、适应性控制系统和人工智能控制系统。根据控制运行的形式,控制系统可分为点位控制和轨迹控制。一套完整的工业机器人包括机器人本体、系统软件、控制柜、外围机械设备、CCD视觉、夹具/抓手、外围设备PLC控制柜、示教器/示教盒。
工业机器人设备 |