ЯЕЭГЮѓВюЗжЮігыМЦЫу
ЪБМф:2015-02-28 15:13 РДдД:здЖЏПижЦЭј
вЛЁЂЯЕЭГЮѓВюгыЦЋВюЕФЙиЯЕ
ЁЁЁЁЩш
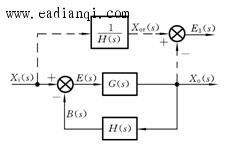
ЁЁЁЁдкШчЭМ1ЫљЪОЕФБеЛЗЯЕЭГжаЃЌЯЕЭГЮѓВю
ЭМ1
ЁЁЁЁЯдШЛЃЌПижЦЯЕЭГЕФЮѓВю ЖўЁЂЯЕЭГЕФЮШЬЌЮѓВюгыЮШЬЌЦЋВю ЁЁЁЁЯЕЭГЙ§ЖЩЙ§ГЬНсЪјКѓЃЌЯЕЭГЪЕМЪЪфГіСПгыЯЕЭГЯЃЭћЕФЪфГіСПжЎМфЕФЦЋВюГЦЮЊЮШЬЌЮѓВюЁЃЫќЪЧЯЕЭГЮШЬЌадФмЕФВтЖШЃЌЗДгГСЫЯЕЭГЯьгІЕФзМШЗадЁЃ
ЁЁЁЁЭЌбљЕиЃЌПЩвдЖЈвхЮШЬЌЦЋВю Ш§ЁЂгыЪфШыКЭЯЕЭГНсЙЙгаЙиЕФЮШЬЌЦЋВю
ЭМ2
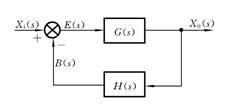
ЁЁЁЁЯжЗжЮіШчЭМ3.6.2ЫљЪОЯЕЭГЕФЮШЬЌЦЋВю
ЁЁЁЁвђ ЁЁЁЁгЩжежЕЖЈРэЕФЯЕЭГЕФЮШЬЌЦЋВюЮЊЃК
ЁЁЁЁ
ЁЁЁЁМД ЁЁЁЁКмЯдШЛЃЌЯЕЭГЕФЮШЬЌЦЋВюВЛНігыЯЕЭГЕФНсЙЙЁЂВЮЪ§гаЙиЃЌЖјЧвгыЯЕЭГЕФЪфШыЕФЬиадгаЙиЁЃЮЊМђЛЏЮШЬЌЦЋВюЕФМЦЫуЃЌЖЈвх
ЁЁЁЁЮЛжУЮоЦЋЯЕЪ§
ЁЁЁЁЫйЖШЮоЦЋЯЕЪ§
ЁЁЁЁМгЫйЖШЮоЦЋЯЕЪ§ ЁЁЁЁдђЃК
ЁЁЁЁЃЈ1ЃЉЕБЯЕЭГЕФЪфШыЮЊЕЅЮЛНздОаХКХЪБЃЌЯЕЭГЕФЮШЬЌЦЋВюЮЊЁЁ
ЁЁЁЁЃЈ2ЃЉЕБЯЕЭГЕФЪфШыЮЊЕЅЮЛаБЦТаХКХЪБЃЌЯЕЭГЕФЮШЬЌЦЋВюЮЊЁЁ
ЁЁЁЁЃЈ3ЃЉЕБЯЕЭГЕФЪфШыЮЊЕЅЮЛМгЫйЖШаХКХЪБЃЌЯЕЭГЕФЮШЬЌЦЋВюЮЊЁЁ
ЁЁЁЁЩшЯЕЭГЕФПЊЛЗДЋЕнКЏЪ§ЮЊЁЁ
ЁЁЁЁЦфжаЃЌ Бэ1ЁЁВЛЭЌаЭДЮЯЕЭГЕФЮѓВюЯЕЪ§МАЦфдкВЛЭЌЪфШыЪБЕФЮШЬЌЦЋВю
ЁЁЁЁЁЁЁЁДгБэ1жаПЩвдПДГіЃЌЭЌвЛЯЕЭГдкВЛЭЌЕФЪфШызїгУЯТЃЌЦфЮШЬЌЦЋВюЪЧВЛЭЌЕФЁЃИќгавтвхЕФЪЧЃЌеыЖдЭЌвЛжжЪфШыЃЌЕБЯЕЭГЕФаЭДЮдіМгЪБЃЌЯЕЭГЕФзМШЗадНЋЕУЕНЬсИпЃЛдіМгЯЕЭГЕФПЊЛЗдівцЃЌЭљЭљвВПЩвдЬсИпЯЕЭГЕФЮШЬЌОЋЖШЁЃЕЋЪЧЃЌе§ШчЕкЮхеТНЋвЊЬжТлЕФФЧбљЃЌЯЕЭГаЭДЮКЭПЊЛЗдівцЕФдіМгЃЌШДЪЙЕУЯЕЭГЕФЮШЖЈадБфВюЁЃвђДЫЃЌЭЈГЃашвЊдкЯЕЭГЕФЮШЖЈадКЭзМШЗаджЎМфНјааШЈКтЃЌБивЊЪБЃЌашвЊв§ШыаЃе§ЛЗНкНјаааЃе§ЁЃ ЁЁЁЁЫФЁЂЯЕЭГДцдкИЩШХзїгУЪБЮѓВюКЭЦЋВю
ЁЁЁЁШєЯЕЭГгаИЩШХ
ЁЁЁЁ
ЁЁЁЁЁЁЁЁЁЁ
ЁЁЁЁЪНжаЃЌ
ЁЁЁЁ
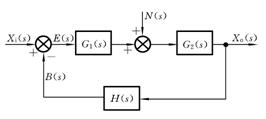
ЭМ.3 ЁЁЁЁвђДЫЃЌЯЕЭГЕФЮѓВюАќРЈСНВПЗжЃЌвЛВПЗжгыЯЕЭГЕФНсЙЙЁЂВЮЪ§КЭЪфШыаХКХгаЙиЃЌСэвЛВПЗжЮЊЯЕЭГдкИЩШХЕЅЖРзїгУЯТВњЩњЕФЪфГіЁЃ ЁЁЁЁдкЪфШыКЭИЩШХЙВЭЌзїгУЯТЕФЦЋВюЮЊ
ЁЁЁЁ ЁЁЁЁгЩЪНЃЈ2ЃЉЁЂЃЈ3ЃЉМАжежЕЖЈРэПЩЕУдкЪфШыКЭгыИЩШХЙВЭЌзїгУЯТЃЌЯЕЭГЕФЮШЬЌЮѓВюКЭЮШЬЌЦЋВюЁЃ ЁЁЁЁЮхЁЂШЮвтЪфШыЪБЃЌЮШЬЌЮѓВюЕФЧѓЗЈ ЁЁЁЁЃЈ1ЃЉЧѓЯЕЭГЦЋВюЕФLaplaceБфЛЛЁЃ ЁЁЁЁЃЈ2ЃЉЖдгкЕЅЮЛЗДРЁЯЕЭГЃЌЮШЬЌЮѓВюЕШгкЮШЬЌЦЋВюЁЃ ЁЁЁЁЃЈ3ЃЉЖдгкЗЧЕЅЮЛЗДРЁЯЕЭГЃЌПЩИљОнЪНЃЈ3.6.1ЃЉНЋЮѓВюЕФLaplaceБфЛЛЛЛЫуЮЊЦЋВюLaplaceБфЛЛЕФБэДяЪНЁЃ ЁЁЁЁЃЈ4ЃЉИљОнжежЕЖЈРэЃЌМДПЩЧѓЕУЯЕЭГЕФЮШЬЌЮѓВюЁЃ
ЁЁЁЁЕБШЛЃЌЯЕЭГЕФЮШЬЌЮѓВюЛЙПЩвдЭЈЙ§ЧѓГіЯЕЭГЕФЪБМфЯьгІЃЌНјЖјЧѓГіЯЕЭГЕФЮѓВюКЏЪ§ |
|||||||||||||||||||||||||||||||||||
 ЃЈ3ЃЉ
ЃЈ3ЃЉ