信号与系统的稳定性(2)
时间:2017-04-26 10:50 来源:自动控制网
由以上讨论可知,冲激响应h(t)的形式取决于H(s)的极点在s平面上的位置,可以归纳为:
(1)极点在原点,原函数取
(2) 极点在实轴点,原函数取
(3)共轭虚极点,原函数取
(4)共轭复极点,原函数取 则根据因果系统的系统函数H(s)的极点位置,判断稳定性的准则为:
当
例3:考虑一LTI系统,其系统函数为: (1)若已知系统是因果的; (2)若系统是稳定的; (3)若系统是不稳定的而且是非因果的,
ROC为:
解:
(1)ROC为:
(2)ROC为:
(3)ROC为: |
 等形式;
等形式; 等形式;
等形式; 等形式;
等形式; 等形式;
等形式; ,则系统本身是稳定的。故为使系统稳定,系统的极点必须全部位于左半s平面,即:
,则系统本身是稳定的。故为使系统稳定,系统的极点必须全部位于左半s平面,即: ;
; 有界,则系统本身是临界稳定的。系统只有简单极点位于jω轴上,而其余极点位于左半S平面上,才能达到稳定;
有界,则系统本身是临界稳定的。系统只有简单极点位于jω轴上,而其余极点位于左半S平面上,才能达到稳定; ,则系统本身是不稳定的。系统的极点只要有一个落在右半S平面上,则系统就不稳定。
,则系统本身是不稳定的。系统的极点只要有一个落在右半S平面上,则系统就不稳定。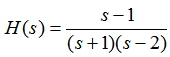 ,在下面几种情况下分别求系统的单位冲激响应。
,在下面几种情况下分别求系统的单位冲激响应。

 ,则其单位冲激响应为:
,则其单位冲激响应为:
 ,则其单位冲激响应为:
,则其单位冲激响应为: