机械手搬运机构的控制
时间:2015-02-28 08:54 来源:自动控制网
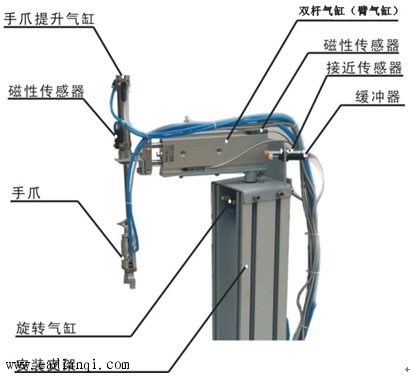
| 一、搬运机构的组成部分 机械手分拣装置的搬运机构能完成四个自由度动作,即手臂伸缩、手臂旋转、手爪上下、手爪紧松(如图1所示)。
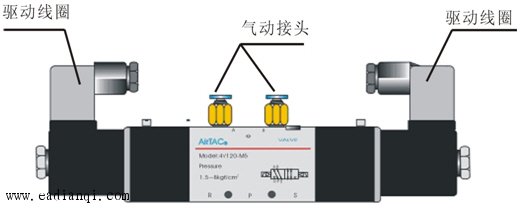
搬运机构的各部分说明如下: 1、手爪提升气缸:提升气缸采用双向电控气阀控制,气缸伸出或缩回可任意定位。 2、磁性开关:检测手爪提升气缸处于伸出或缩回位置。 3、手爪: 抓取物料由单向电控气阀控制,当单向电控气阀得电,手爪夹紧磁性开关有信号输出,指示灯亮,单向电控气阀断电,手爪松开。 4、旋转气缸:机械手臂的正反转,由双向电控气阀控制。 5、接近传感器:机械手臂正转和反转到位后,接近传感器信号输出。 6、双杆气缸:机械手臂伸出、缩回,由双向电控气阀控制。气缸上装有两个磁性开关,检测气缸伸出或缩回位置。 7、缓冲器:旋转气缸高速正转和反转到位时,起缓冲减速作用。 二、双向电磁阀 搬运机构共有四个主要的气动执行机构,即旋转气缸、臂气缸、提升气缸和夹紧气缸,都用双向电磁阀来控制四个气缸的进气和出气,从而实现气缸的伸出、缩回运动。 双向电磁阀的工作原理为:电磁阀通电时,电磁力将先导孔打开,上腔室压力迅速下降,在膜片周围形成上低下高的压差,推动膜片向上移动,阀门打开,电磁阀双向流通;断电时,弹簧力把先导孔关闭,当进口压力大于出口压力,阀门双向关闭,当进口压力小于出口压力时,电磁阀逆向可流通。 如图2所示为搬运机构常用的两位五通双向电磁阀,它具有1个进气孔(接进气气源)、1个正动作出气孔和1个反动作出气孔(分别提供给目标设备的一正一反动作的气源)、1个正动作排气孔和1个反动作排气孔。
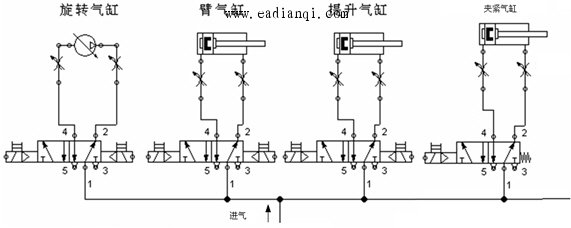
在两位五通电磁阀工作的气路中,给正动作线圈通电,则正动作气路接通(正动作出气孔有气),即使给正动作线圈断电后正动作气路仍然是接通的,将会一直维持到给反动作线圈通电为止;给反动作线圈通电,则反动作气路接通(反动作出气孔有气),即使给反动作线圈断电后反动作气路仍然是接通的,将会一直维持到给正动作线圈通电为止。这种现象就相当于“自锁”。 基于两位五通双电控电磁阀的这种特性,在设计机电控制回路或编制PLC程序的时候,可以让电磁阀线圈动作1~2秒就可以了,这样可以保护电磁阀线圈不容易损坏。 图3所示是由两位五通电磁阀和四个气缸所组成的机械手搬运机构的气路。
|