主要着重研究描述线性、定常、集总参量控制系统的微分方程的建立和求解方法。
1、 线性元件的微分方程
以举例说明控制系统中常用的电气元件、力学元 件等微分方程的列写。
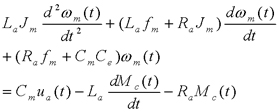
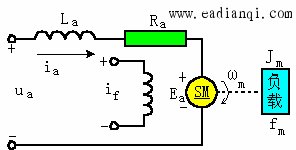
例1: 图示电枢控制直流电动机原理图,列出以Ua(t)为输入量,ωm(t)
为输出量的微分方程。
|
|
|
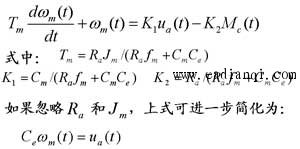
解:
由于电枢电感La较小,通常可忽略不计,上式可简化为:
|
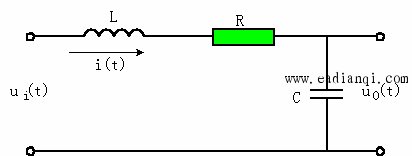
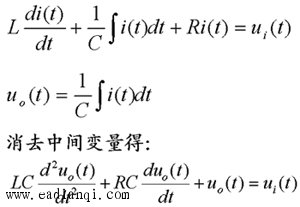
例2: 图示RLC无源网络,列出以Ui(t)为输入量,以U0(t)为输出量的网络微分方程。
解:
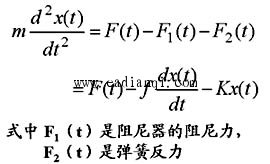
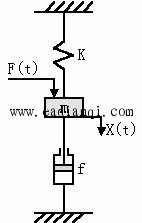
例3:图示弹簧-质量-阻尼器机械位移系统。试列写质量m在外力F(t)作用下位移x(t)的运动方程。
解:由牛顿运动定律有
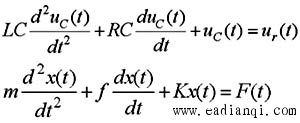
比较: R-L-C电路运动方程与 M-S-D机械系统 运动方程
相似系统:揭示了不同物理现象之间的相似关系。
便于用简单系统去研究相似的复杂系统。
2、控制系统微分方程的建立
基本步骤:
(1)由系统原理图画出系统方框图或直接确定 系统中各个基本部件(元件)
(2)列写各方框图的输入输出之间的微分方程,要注意前后连接的两个元件中,后级元件对前级元件的负载效应
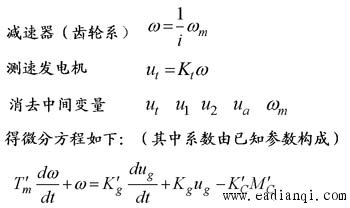
(3)消去中间变量
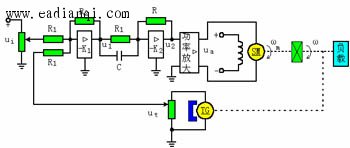
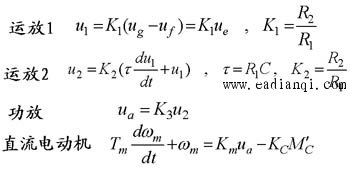
举例4:速度控制系统的微分方程
控制系统的主要部件(元件):给定电位器、运放1、运放2、功率放大器、直流电动机、减速器、测速发电机
3、线性系统的特性
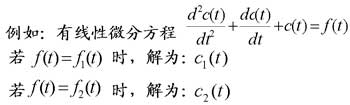
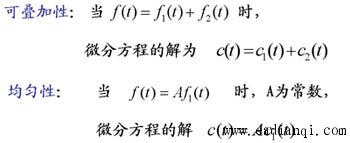
(1)、线性系统是指用线性微分方程描述的系统,其重要性质是可以应用叠加原理。
(2)、叠加原理具有可叠加性和均匀性。
4、线性定常微分方程的求解
直接求解法:通解+特解
自由解+强迫解(零输入响应+零状态响应)
换域求解法:Laplace 变换方法
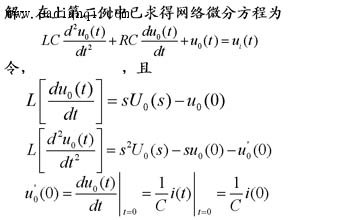
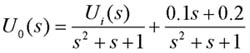
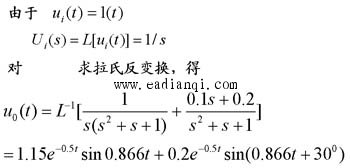
分别对各项求拉氏变换并整理后有
|