初识控制系统计算机仿真和辅助设计
时间:2015-03-27 10:42 来源:自动控制网
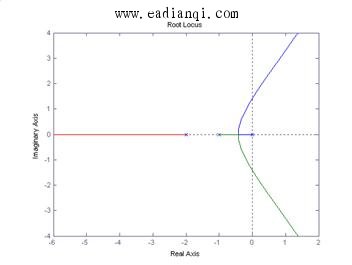
例1 已知某系统的开环传递函数为G(s)H(s)=K/s(s+1)(s+2)试绘制系统根轨迹,并确定系统临界稳定时对应的开环增益及对应系统临界阻尼比的开环增益。 Matlab仿真程序如下: clear clc num=1; den=poly([0-1-2]);%由系统的极点求系统开环传函的分母多项式 rlocus(num,den);%画根轨迹 [k,p]=rlocfind(num,den)%确定根轨迹某一点处的开环增益值 仿真结果:
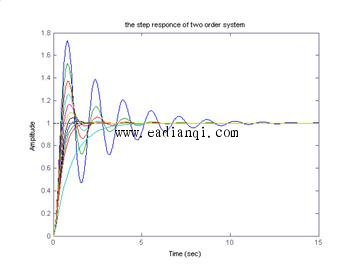
例2 已知典型二阶系统的传递函数为G(s)=wn^2/(s^2+2*i*wn+wn^2),试绘制当wn=4时,分别为0.1,0.2,...,1.0,2.0时的系统的单位阶跃响应。 Matlab仿真程序如下: close clear clc wn=4; kosai=[0.1:0.1:1,2]; figure(1) holdon fori=kosai num=wn*wn; den=[12*i*wnwn*wn]; step(num,den) end title('thestepresponceoftwoordersystem'); 仿真结果:
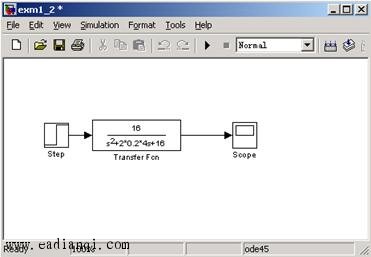
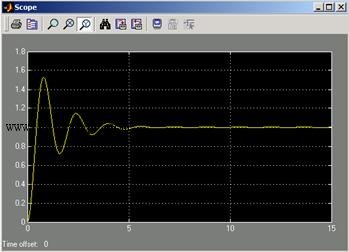
例3 Simulink仿真如下:
仿真结果:
|