一般机械手能实现机械手的伸缩、回转、升降和手腕的动作,每一个动作都是由液压伺服系统驱动的,其工作原理基本相同。现在以伸缩运动的伺服控制系统为例,介绍它的工作原理。
图1所示为机械手手臂伸缩电液伺服系统的原理。它主要由电液伺服阀1、液压缸2、活塞杆带动的机械手手臂3、齿轮齿条机构4、电位器5、步进电动机6和放大器7等元件组成。它是电液位置伺服系统。当电位器的触头处于中位时,触头上没有电压输出。当它偏离这个位置时,由于产生了偏差就会输出相应的电压。电位器触头产生的微弱电压,经过放大器放大后对电液伺服阀进行控制。电位器触头由步进电动机带动旋转,步进电动机的角位移和角速度由数字控制装置发出的脉冲数和脉冲频率控制。齿条固定在机械手手臂上,电位器壳体固定在齿轮上。当机械手手臂带动齿轮齿条转动时,电位器壳体同齿轮一起转动,形成负反馈。
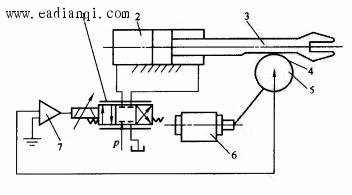
图1 机械手手臂伸缩电液伺服系统的原理
1—电液伺服阀;2—液压缸;3—机械手手臂;4—齿轮齿条机构; 5—电位器; 6—步进电机;
7—放大器
机械手伸缩系统的工作原理如下。
由数字控制装置发出一定数量的脉冲,使步进电动机带动电位器5的动触头转过一定的
角度 (假定为顺时针方向转动),动触头偏离电位器中位,产生微弱电压 (假定为顺时针方向转动),动触头偏离电位器中位,产生微弱电压 ,经过放大器 ,经过放大器
7放大成 后,输入给电液伺服阀1的控制线圈,使电液伺服阀产生一定的开口量。这时液压油终经电液伺服阀的开口进入液压缸的左腔,推动活塞连同机械手手臂一起向右运动,行程为 后,输入给电液伺服阀1的控制线圈,使电液伺服阀产生一定的开口量。这时液压油终经电液伺服阀的开口进入液压缸的左腔,推动活塞连同机械手手臂一起向右运动,行程为 。液压缸右腔的回油经电液伺服阀流回油箱。由于齿轮和机械手手臂上的齿条啮合,机械手手臂向右运动时,电位器随之作顺时针方向转动。当电位器的中位与触头重合时,偏差为零,则动触头输出的电压为零,电液伺服阀失去输入信号,阀口关闭,机械手手臂停止运动。机械手手臂移动的行程决定于脉冲频率。当数字控制装置发出反向脉冲时,步进电动机逆时针方向转动,机械手手臂缩回。 。液压缸右腔的回油经电液伺服阀流回油箱。由于齿轮和机械手手臂上的齿条啮合,机械手手臂向右运动时,电位器随之作顺时针方向转动。当电位器的中位与触头重合时,偏差为零,则动触头输出的电压为零,电液伺服阀失去输入信号,阀口关闭,机械手手臂停止运动。机械手手臂移动的行程决定于脉冲频率。当数字控制装置发出反向脉冲时,步进电动机逆时针方向转动,机械手手臂缩回。
图2所示为机械手手臂伸缩运动伺服系统的方框图。
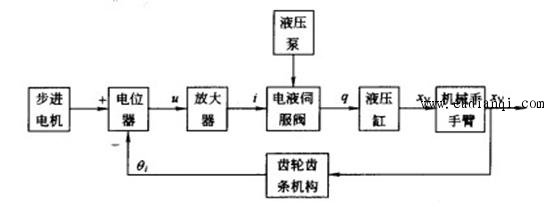
图2 机械手手臂伸缩运动伺服系统的方框图
|
